High-Speed Remote Control Engineering
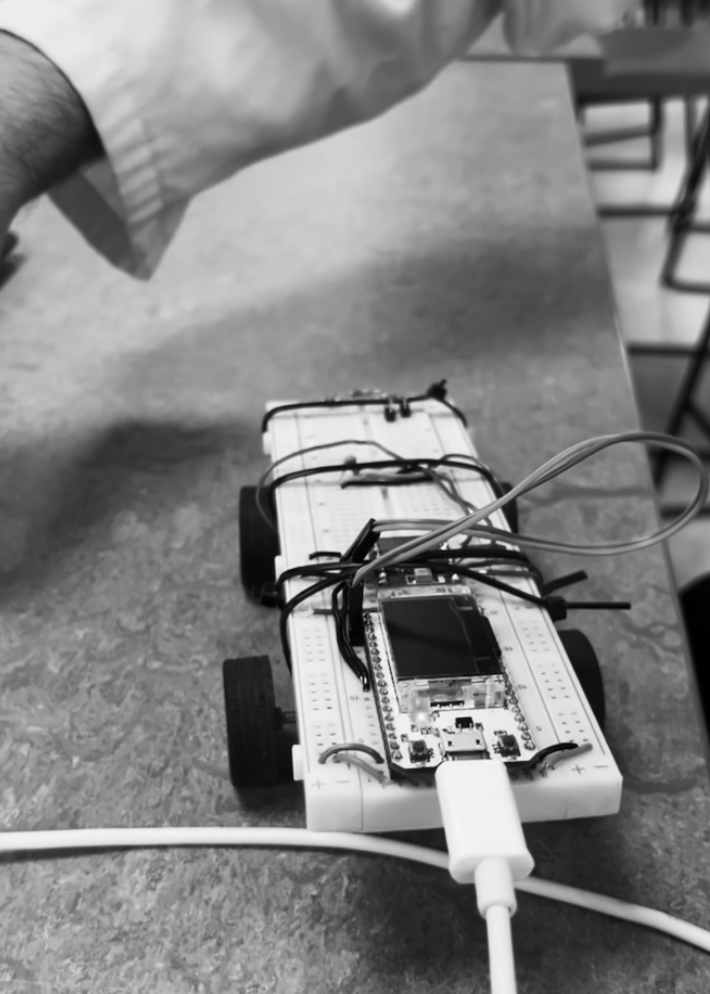
As part of our electronics course, we designed and built a Bluetooth-controlled car using MicroPython and the ESP32 microcontroller. We repurposed motors from an R/C toy car, wrote control functions, and integrated wireless communication to steer and drive the car via a phone app.
Engineering Challenges
Power Management
Managing voltage demands and optimising dual-battery setup for consistent motor performance and reliable operation.
Wireless Communication
Implementing stable Bluetooth connectivity between ESP32 and mobile app for real-time control responsiveness.
Motor Control
Precise PWM control of dual motors for smooth steering and speed regulation through H-Bridge drivers.
Technical Implementation
Our car combined two 4.8V DC motors, one for speed and one for steering, connected to an ESP32 via H-Bridge motor drivers, using PWM for precise motor control and MicroPython for real-time processing.
ESP32 Control
Powerful microcontroller handling Bluetooth communication and real-time motor control algorithms.
MicroPython Programming
High-level programming language enabling rapid development and easy debugging of control systems.
PWM Motor Control
Pulse Width Modulation for precise speed and direction control of dual motor configuration.
App Integration
Smartphone app with joystick interface for intuitive remote control and real-time command transmission.
System Specs
- ESP32 microcontroller
- Dual 4.8V DC motors
- H-Bridge motor drivers
- Bluetooth 4.0 connectivity
- PWM speed control
- Real-time response
Development Process
Hardware Assembly
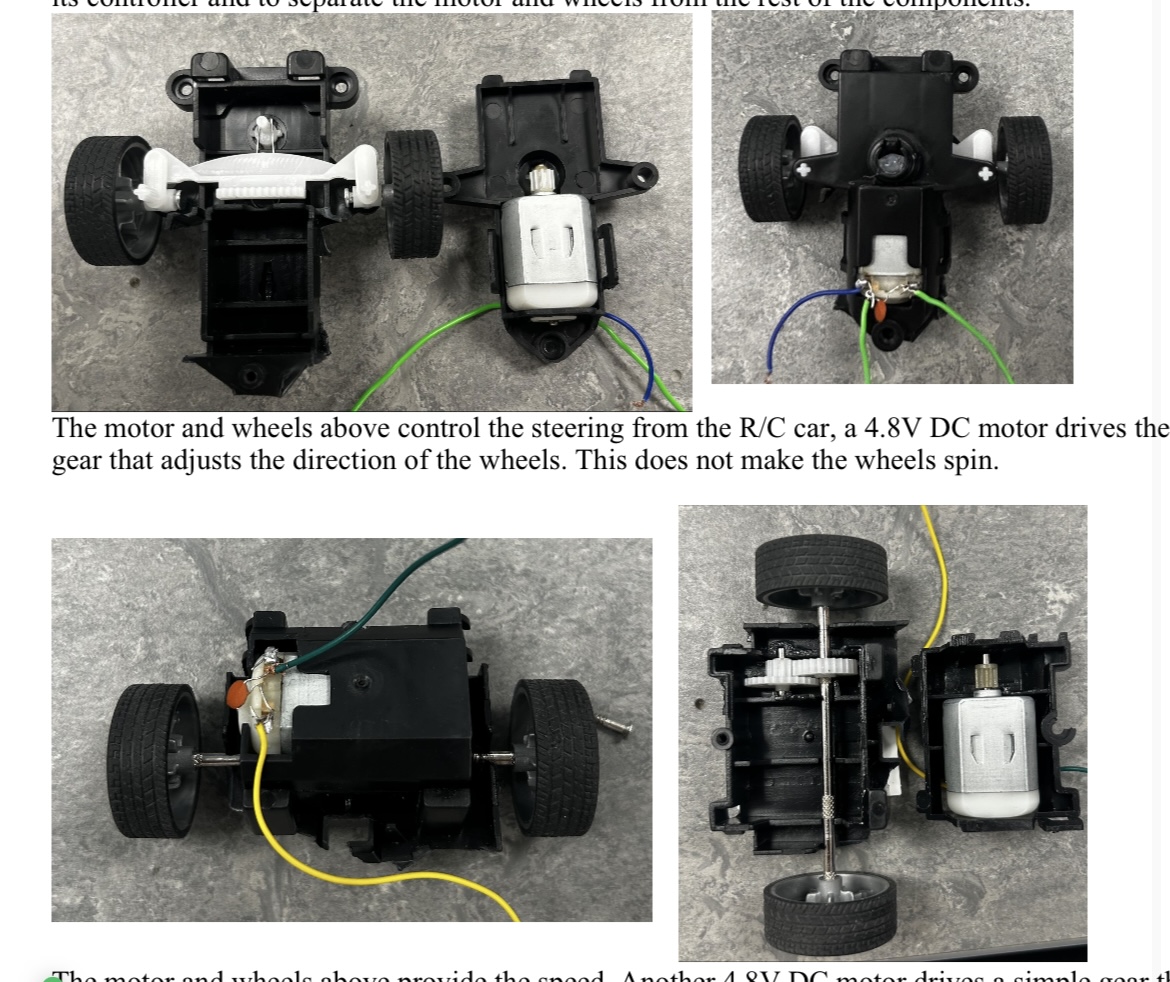
Repurposing R/C car motors and integrating ESP32 with H-Bridge drivers for motor control.
Software Development
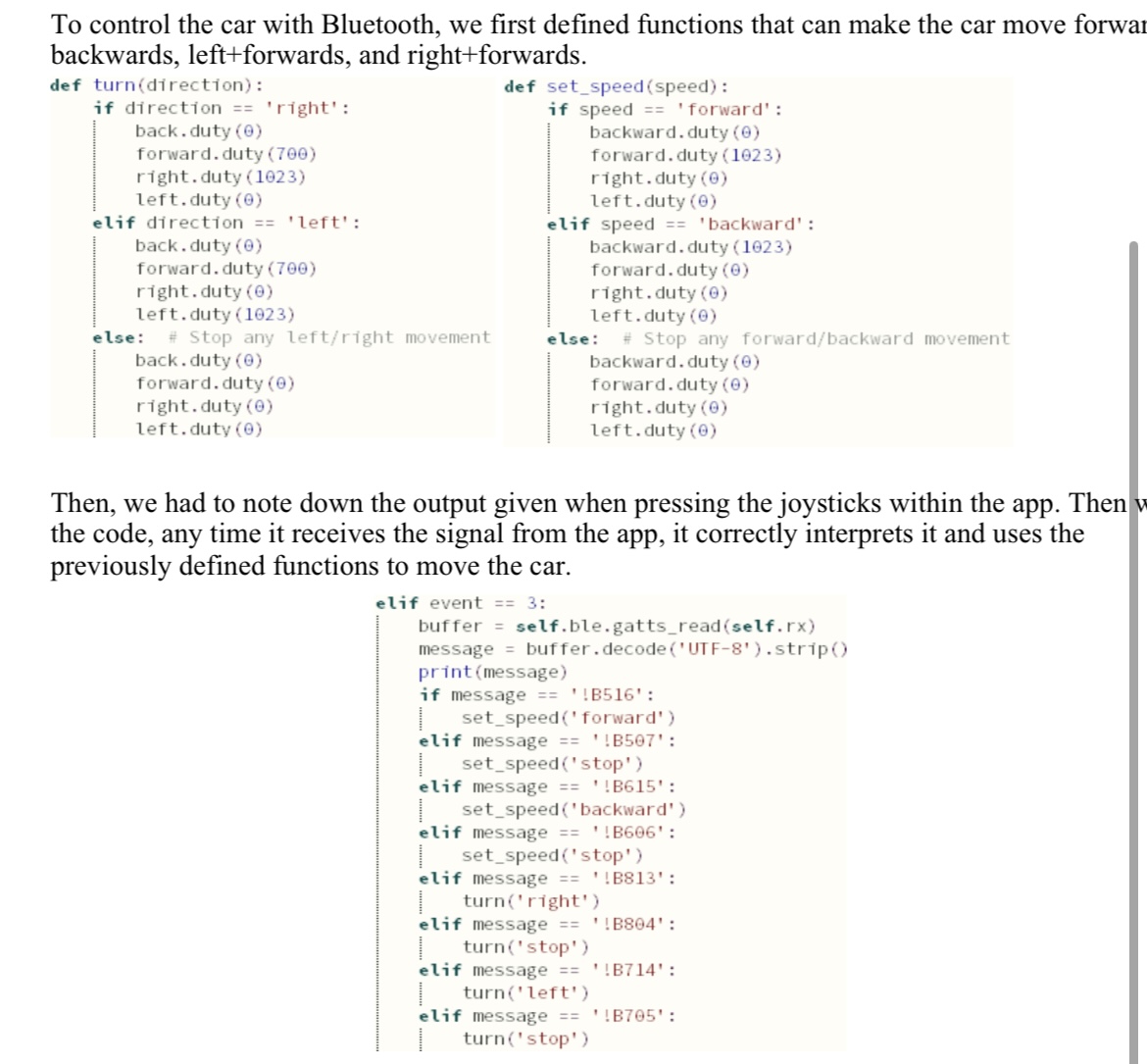
Programming MicroPython control scripts for Bluetooth communication and PWM motor control.
System Integration
Debugging voltage issues, optimising battery setup, and fine-tuning control logic for smooth operation.
Race Competition
Testing performance under competitive conditions and achieving 3rd place finish in the final race.
Results & Performance
This project merged hardware hacking, software control, and embedded systems design into a fully functional remote-control car, demonstrating the successful integration of multiple engineering disciplines.
3rd Place Finish
Competitive performance in final race demonstrating reliability and speed of our solution
Technical Excellence
Successful integration of ESP32, dual motors, and wireless communication systems
Performance Optimisation
Fine-tuned control algorithms and power management for maximum speed and responsiveness
"This project taught me the importance of balancing theoretical knowledge with practical problem-solving, especially when dealing with real-world constraints like power management and wireless communication reliability."